
线性导轨和系统-包括笛卡尔机器人,龙门架系统,XY桌-通常受到由向下、向上和侧载荷引起的线性力和由悬挑载荷引起的旋转力。旋转力-也称为力矩-通常定义为滚转,俯仰和偏航,基于系统试图旋转的轴。
力矩是由施加在远处的力引起的。力矩力不会引起旋转,尽管它经常被混淆转矩,这是一种使物体绕轴旋转的力。
为了在线性系统中定义横摇、俯仰和偏航,我们首先需要建立三个主要轴:X、Y和Z。
 水平面的两个轴通常定义为X和Y,其中X轴在运动方向上。Y轴与运动方向正交(垂直),也在水平面上。Z轴与X轴和Y轴都正交,但它位于垂直平面上。(要找到Z轴的正方向,使用右手定则:食指指向正X方向,然后向正Y方向卷曲,拇指指向正z)
水平面的两个轴通常定义为X和Y,其中X轴在运动方向上。Y轴与运动方向正交(垂直),也在水平面上。Z轴与X轴和Y轴都正交,但它位于垂直平面上。(要找到Z轴的正方向,使用右手定则:食指指向正X方向,然后向正Y方向卷曲,拇指指向正z)
在多轴系统中,底轴的运动方向通常定义为X轴。如果它上面的下一个轴也是水平的,那么这个轴被定义为Y,而垂直轴(即使它是直接在X上面的第二个轴)被定义为Z轴。
滚转、俯仰和偏航是关于X、Y和Z轴的旋转力或力矩.就像纯线性力一样,在计算轴承寿命或确定线性系统是否适合承受静载荷时,需要考虑这些力矩。
卷:滚动力矩是一种试图使系统围绕X轴从一边到另一边旋转的力。滚动的一个很好的例子是飞机倾斜。

带有“背靠背”或“O”的再循环轴承,水沟的安排与“前对前”或“X”排列的轴承相比,具有更高的滚动力矩容量,这是由于滚珠和滚道之间的接触线形成了更大的力矩臂。
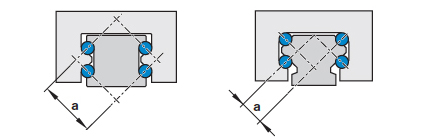
图片来源:博世力士乐
情节:俯仰力矩试图使系统围绕其Y轴旋转,从前到后。想象俯仰,想象飞机的机头朝下或朝上。

偏航:偏航发生在力试图使系统围绕Z轴旋转时。为了想象偏航,想象一架模型飞机悬挂在一根绳子上。如果风吹得正好,飞机的机翼和机头将保持水平(不滚动或俯仰),但它将围绕悬挂它的绳子旋转。这是偏航。
俯仰和偏航力矩都对位于线性轴承两端的球施加额外的载荷,这种情况有时被称为边缘载荷。
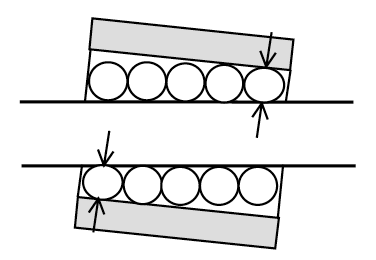
图片来源:NSK
如何抵消翻滚,俯仰和偏航的时刻
直线导轨和系统对纯线性力的承受能力高于力矩,因此将力矩分解为线性力可以显著提高轴承寿命并减少挠度。对于滚动力矩,实现这一点的方法是平行使用两个线性导轨,每个导轨有一个或两个轴承。这将滚动力矩力转换为每个轴承上的纯向下和升空载荷。
同样,在一个导轨上使用两个轴承可以消除俯仰力矩,将它们转换为每个轴承上的纯向下和升空载荷。在一个导轨上使用两个轴承也可以抵消偏航力矩,但在这种情况下,所产生的力是每个轴承上的侧(侧向)力。
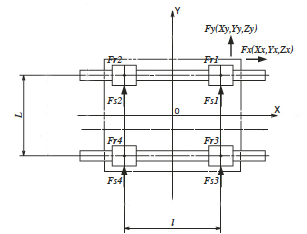
图片来源:NSK
特征图片来源:纽波特






留下回复
你一定是登录发表评论。