
绝大多数直线运动应用(气动驱动类型除外)使用步进电机或伺服电机为驱动机构提供扭矩,驱动开云体育store机构通常是滚珠或丝杠、齿条和齿轮或皮带和皮带轮系统。与线性运动中涉及的其他组件不同,在选择电机时,通常会对“我应该使用哪种技术”这个问题有一个明确的答案。这是因为伺服电机而且步进电机是为非常不同的性能特点而设计的。决定对给定的应用程序使用哪种方法需要理解这些差异,并将其与其他因素(如成本和复杂性)进行平衡。

图片来源:Advanced Micro Controls, Inc.
定位
伺服电机的基本前提是它在闭环系统中运行,这意味着编码器或反馈装置向控制器发送信号,指示电机的实际位置。该信息与命令位置进行比较,控制器向电机发送校正信号,以使误差最小化。结果是非常紧密的定位精度和更可靠的定位可以实现与步进电机。然而,闭环系统需要调优的控制参数和设置都比较耗时。反馈所需的额外组件和更大的复杂性也使它们比步进器更昂贵。
步进电机在开环系统中运行,没有反馈机制来确认电机实际到达命令位置。但是,对于步进电机来说,实现精确的位置通常更容易,因为它们以谨慎的步骤移动——每转最多500步,这意味着每一步等于0.75度的电机旋转。当在其设计限制内操作时,步进电机不会“丢失”步长,为具有可预测扭矩和速度要求的应用程序提供非常好的定位精度。开云体育store
速度
一般规则是,步进电机最适合运行在1000转及以下的应用程序。开云体育store这是因为在较高的速度下,步进电机的扭矩产量迅速下降。伺服电机可以在很宽的速度范围内运行,它们通常是高速应用的更好选择。开云体育store
在静止时,步进电机可以使用它们的启动转矩在电机没有电源的情况下,将负载固定在适当位置。伺服电机也能够保持负载在静止状态,但需要电机的动力,以便这样做。此外,当处于静止状态时,伺服电机永远不会完全尽管如此,由于控制器不断地从编码器读取反馈,并发出移动命令来补偿任何位置错误。(这种现象有时被称为“寻找职位”。)
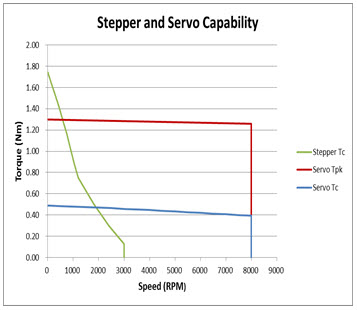
转矩
如前所述,步进电机随着速度的增加而迅速失去扭矩能力,扭矩通常在1000转/分以上的速度下下降。然而,在较低的速度下,步进电机对于给定的电机尺寸具有良好的扭矩产生能力。然而,重要的是,永远不要超过步进电机的额定扭矩(这可能会限制其加速能力),因为这样做可能会导致丢失步长或导致电机失速。
伺服电机是更好的技术应用,在良好的扭矩生产需要在高速。开云体育store伺服系统也能够保持给定的扭矩,即使当电机速度变化。
图片来源:kolmorgen
与伺服电机相反,伺服电机只吸取实现所需移动所需的电流,步进电机连续地吸取电流,不管负载和速度如何。这导致产生更高的热量,这在某些应用中可能是一个负面因素。开云体育store
判决结果
一般来说,伺服电机是需要精确定位、高速和/或能够承受变化负载(特别是那些可能需要高于额定电机扭矩的应用开云体育store)的应用程序的更好选择。对于不需开云体育store要位置反馈和仅在电机设计限制内运行的应用,步进电机提供了一种更简单、更经济的解决方案。






这是在选择电机时最常见的疑问之一。我想分享一下电机选型的相关内容。您将发现这个和许多其他查询http://clr.es/en/home/download/free-ebook-electric-motors?ebook=electric_motors希望你觉得有趣。