
为线性运动系统选择正确的伺服电机是一项复杂的任务,从最初的假设和组件选择开始,必须通过一系列计算进行检查,在大多数情况下,经过多次迭代,直到找到电机和力学的合适组合。大多数电机制造商提供在线尺寸工具,使过程更容易,确保选择最好的组件,并帮助保持设计工程师的理智。但作为设计师,甚至是最终用户,了解伺服电机尺寸的三个关键参数是很重要的:惯性、速度和扭矩。
惯性
惯性是物体对速度变化的阻力。对于伺服定标,负载惯量与电机惯量的比值表示电机在加减速时控制负载的情况。系统中的每一个旋转部件都产生了电机必须克服的惯性。这通常包括执行器或驱动器(滚珠丝杠,皮带,齿条和齿轮),外部(移动)负载和联轴器。

Jl负载惯量反映到电机
JD=执行机构或驱动器的惯性(滚珠丝杠、皮带、齿轮齿条)
JE=外部(移动)载荷的惯量
JC耦合惯性
当变速箱在系统中使用时,它的惯性也必须包括在内。然而,齿轮箱的增加减少了负载组件(执行器,负载和联轴器)的惯性,其平方反比的齿轮传动比。

JG齿轮箱惯量
齿轮传动比
理论上,1:1的“完美”惯性匹配应该是目标,但这是很难实现或实际.伺服上浆的一个常见的经验法则是争取10:1或更少的惯性比。
速度
系统的运动剖面——它在加速、减速和恒定速度上花费的时间——通常可以用a来近似三角形的或梯形的表示速度与时间的图表。

因为皮带驱动系统通常有一个很高的领先常数(每滑轮旋转的距离),通常添加一个变速箱来增加电机的速度。例如,如果带传动系统的引线常数为100毫米,应用程序的最大速度为1米/秒,电机的最大速度将仅为每秒10转,或600转/分钟。增加一个3:1比例的变速箱将增加所需的电机转速到1800转/分,也可能提供更理想的惯性匹配。
转矩
转矩可能是伺服电机尺寸中最重要的因素。扭矩有三个重要的组成部分:由加速度引起的扭矩,由负载引起的扭矩和由摩擦引起的扭矩。基于这些部件,可以进行两种计算:最大扭矩和RMS(均方根)扭矩.这些与电机的转矩-速度曲线进行了比较,该曲线显示了电机的连续和间歇操作区域。
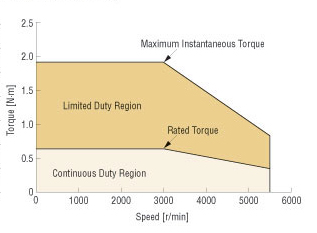
图片来源:东方汽车美国公司
最大或峰值扭矩通常发生在加速过程中,并且包含所有三个部分——加速度、负载和摩擦。这也是电机尺寸的迭代性质发挥作用的地方,因为加速度扭矩是基于系统的总惯量,包括电机惯量。但由于电机是未知的,必须进行初步选择,并将其惯性因素纳入扭矩方程。最大扭矩可能会落在间歇操作区,因为它只需要很短的时间。
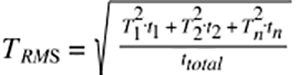
RMS扭矩是在整个占空比中所需的不同扭矩值的时间加权平均值,包括任何停留时间。所需的RMS转矩应落在电机的连续工作区域内,以确保电机不会经历过热。
可以理解的是,大多数设计师和最终用户在选择伺服电机时依赖于制造商的尺寸软件。但是,对伺服电机尺寸的三个基本组成部分的认识和理解可以提供洞察,从而在电机选择中做出更好的决策,最终导致性能更好,更具成本效益的系统。

留下回复
你一定是登录发表评论。