
如果您的应用程序调用笛卡儿的机器人,您有各种各样的选择,这取决于您想要进行的集成级别。虽然预先设计的笛卡尔式机器人随着制造商扩大他们的产品范围以适应更广泛的性能标准,越来越广泛地被采用,一些应用仍然需要构建自己的笛卡尔系统,例如,满足特殊的环境条件或满足高度专业化的性能要求。开云体育store
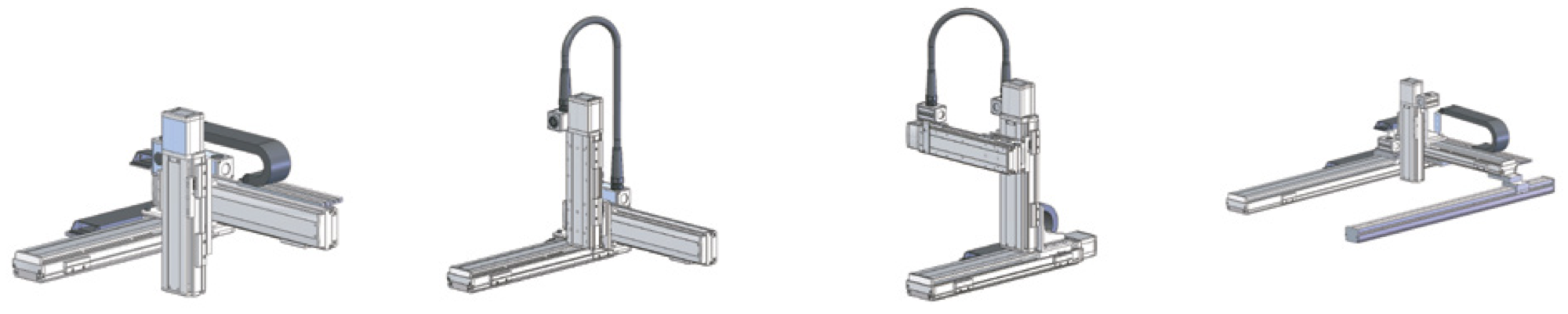
这里有一些来自IAI的3轴笛卡尔系统的例子。
但是“构建自己的”并不一定意味着“从头构建”。举个例子:笛卡尔机器人的关键部件——线性执行器——有多种配置,所以几乎没有必要从头开始构建执行器。许多线性执行器制造商提供连接套件和安装支架,使从目录规格执行器组装自己的笛卡尔系统成为一个相对简单的练习。
然而,确定基本布局和选择合适的线性执行器只是第一步。为了避免最终得到的笛卡尔式系统不能满足应用程序需求或不符合预期的占用空间,请记住以下考虑事项——尤其是在设计阶段。
系统配置
在设计笛卡尔机器人时,首先要指定的事情之一是轴的配置,不仅要实现必要的运动,还要确保系统具有足够的刚度,这可能会影响承载能力、旅行精度和定位精度。事实上,一些需要在笛卡尔坐标开云体育store中运动的应用程序更好地使用a龙门式机器人而不是笛卡尔坐标系,特别是如果Y轴需要很长的行程,或者笛卡尔坐标系会在其中一个轴上施加很大的力矩载荷。在这些情况下,龙门系统的双x轴或双y轴可能是必要的,以防止过度偏转或振动。
如果笛卡尔系统是最佳解决方案,那么下一个设计选项通常是执行器的驱动单元——最常见的选择是皮带、螺杆或气动驱动系统。无论驱动系统如何,线性执行器通常都提供单线性导轨或双线性导轨。
绝大多数笛卡尔机器人使用双导轨配置,因为它提供了更好的支持悬垂(力矩)负载-但双线性导轨轴将比单线性导轨轴有更宽的足迹。另一方面,双导系统通常较短(垂直方向),这样可以防止与机器其他部件的干扰。重点是,您选择的轴类型不仅影响笛卡尔系统的性能,还影响总体占用空间。

图片来源:Coord3
在考虑系统的占地面积时,不要忘记需要合并的末端执行器或末端臂(EOA)工具。重要的是要在设计阶段的早期考虑这一点,以确保夹具或点胶头等工具与笛卡尔系统的其他组件或机器本身之间没有干扰。

图片来源:Fisnar
有线电视管理
笛卡尔式机器人设计的另一个重要方面是电缆管理,这在早期阶段经常被忽视(或简单地推迟到设计的后期阶段)。每个轴都需要多个电缆用于动力、空气(用于气动轴)、编码器反馈(用于伺服驱动笛卡尔轴)、传感器和其他电气组件。当系统和组件集成到工业物联网(IIoT)时,连接它们的方法和工具变得更加关键。所有这些电缆、电线和连接器都必须仔细布线和管理,以确保它们不会由于过度弯曲或由于与系统其他部分的干扰而遭受过早疲劳。
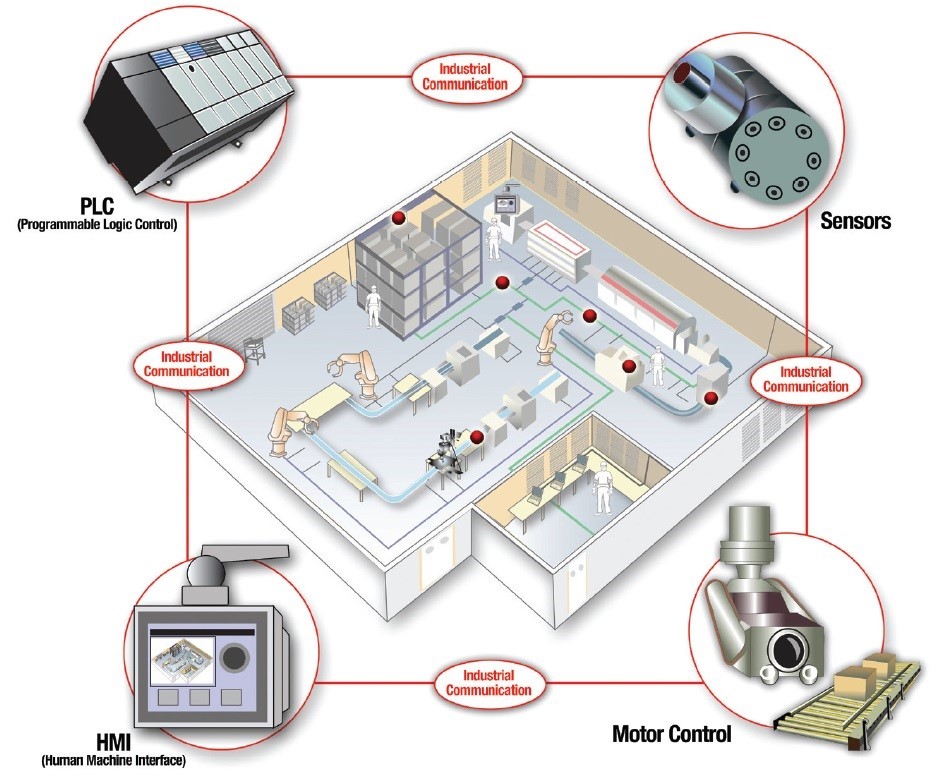
图片来源:德州仪器
笛卡尔式(以及SCARA和6轴)机器人使这种连接更具挑战性,因为轴可以独立移动,也可以彼此同步移动。但有一件事可以帮助降低电缆管理的复杂性,那就是使用减少所需电缆数量的组件,例如,将动力和反馈集成到一根电缆中的电机,或集成的电机驱动组合。
控件的类型和网络协议还可以影响所需电缆的类型和数量以及电缆管理的复杂性。别忘了电缆管理系统有线电视运营商,托盘,或外壳-会影响整个系统的尺寸,所以检查电缆管理系统与机器人和机器的其他部件之间是否有干扰是很重要的。
控制

图片来源:precision Automation
笛卡尔机器人是点对点移动的首选解决方案,但它们也可以产生复杂的内插移动和轮廓运动。的运动类型将有助于确定什么控制系统、网络协议、HMI和其他运动组件最适合该系统。尽管这些组件在很大程度上是与笛卡尔机器人的轴分开安装的,但它们会影响电机、电缆和其他轴上电子组件的需求。这些轴上组件将依次在前两个设计考虑因素中发挥作用:配置和电缆管理。
因此,设计过程是“完整的”,重申了将笛卡尔机器人设计为集成机电单元的重要性,而不是简单地连接到电气硬件和软件的一系列机械部件。





留下回复
你一定是登录发表评论。