

图片来源:罗龙公司
笛卡尔式机器人在两个或三个轴上沿轨道运行笛卡尔坐标系虽然SCARA和6轴机器人得到了更广泛的认可,但笛卡尔系统几乎可以在所有可以想象到的工业应用中找到,从半导体制造到木工设备。笛卡尔理论被广泛应用也就不足为奇了。它们似乎有无限的配置,可以轻松定制以满足确切的应用参数。
虽然笛卡尔机器人传统上是由集成商和最终用户自行设计和制造的,但大多数线性执行器制造商现在都提供预先设计好的笛卡尔机器人,与从零开始构建系统相比,这大大减少了工程、组装和启动时间。在选择一个预先设计的笛卡尔机器人时,有三件事要记住,以确保您获得最适合您的应用程序的系统。
取向
方向通常由应用程序决定,关键因素是需要从上面还是下面处理部件,或者需要从下面进行过程。同样重要的是,要确保该系统不会干扰其他固定或移动部件,也不会构成安全隐患。幸运的是,笛卡尔机器人有许多不同的X-Y和X-Y- z配置,以满足应用和空间限制。在标准的多轴方向,也有选项安装执行器直立或在他们的侧面。这种设计选择通常考虑到刚度,因为一些执行器(特别是带有双导轨的执行器)在安装在其侧面时具有更高的刚度。

图片来源:伺服视觉有限公司
对于最外层的轴(X-Y结构中的Y轴,或X-Y-Z结构中的Z轴),设计师可以选择底座是随着支架移动而固定,还是支架随着底座移动而固定。固定支架和移动底座的主要原因是干扰。如果执行器突出到工作区域,需要在其他系统或过程移动时移开,则移动底座可以使执行器的很大一部分缩回并腾出空间。然而,它确实会增加移动质量和惯性,所以在调整变速箱和电机的尺寸时应该考虑到这一点。电缆管理必须设计成它可以随着轴移动,因为电机将会移动。预工程系统考虑到这些问题,并确保所有组件的设计和大小都适合笛卡尔系统的确切方向和布局。
负载,行程和速度
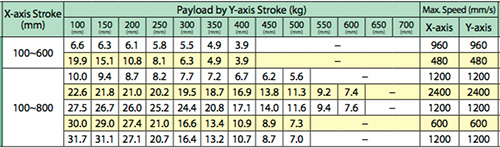
这三个应用参数是大多数笛卡尔机器人选择的基础。应用程序需要在给定的时间内将特定的负载移动到特定的距离。但它们也是相互依赖的——随着负载的增加,最大速度最终会开始下降。如果最外层作动器为悬臂式,行程受负载限制;如果作动器为滚珠丝杠驱动,行程受速度限制。这使得测量笛卡尔系统的大小成为一项非常复杂的工作。
为了简化设计和测量任务,笛卡尔机器人制造商通常提供图表或表格,为指定的行程长度和方向提供最大负载和速度。然而,一些制造商声称最大负载、行程和速度能力是相互独立的。重要的是要了解公布的规格是否相互排斥,或者最大负载、速度和行程规格是否可以同时实现。
精密度和准确度
线性执行器是笛卡尔机器人精度和精度的基础。执行器的类型——是铝底座还是钢底座,以及驱动机构是皮带、螺旋、直线电机还是气动——是精度和可重复性的主要决定因素。但是,驱动器的安装和固定方式也会影响机器人的行进精度。在装配过程中进行精确对齐和固定的笛卡尔机器人通常比没有固定的系统具有更高的运动精度,并且能够更好地在其生命周期内保持这种精度。
在任何多轴系统中,轴之间的连接都不是完全刚性的,并且有许多变量影响每个轴的行为。这使得旅行精度和可重复性难以计算或数学建模。确保笛卡尔系统满足所需的行程精度和可重复性的最佳选择是寻找已经过制造商测试的系统,具有类似的负载、行程和速度。大多数笛卡尔机器人制造商认识到这是用户关注的一个关键问题,并测试了他们的系统,以便在各种应用程序中提供有关性能的“真实世界”数据。开云体育store
与内部设计和组装的机器人相比,预先设计的笛卡尔机器人大大节省了成本。多轴系统的大小、选择、订购、组装、启动和故障排除所需的时间可能是数百小时,而预先设计的系统将这一时间减少到仅几个小时的选择和启动时间。制造商标准产品中提供的配置、导轨类型和驱动技术的范围意味着设计师和工程师不必在性能上妥协,也不必为超出应用需求的功能买单。
图片来源:RobotWorx

留下回复
你一定是登录发表评论。