
我们在这个网站上写了几篇关于笛卡儿的机器人但是,让我们退一步来定义机器人究竟是什么笛卡儿机器人,而不是另一种类型的机器人或多轴系统。

图片来源:RobotWorx
首先,笛卡尔系统是一个在三个方向运动的系统,正交轴- X, Y和Z -根据笛卡儿坐标.(尽管需要注意的是,旋转轴-以末端执行器或末端手臂工具的形式-有时包含在笛卡尔机器人的最外层轴上。)
是什么让笛卡尔机器人成为一个机器人就是这些轴通过一个共同的运动控制器进行协调运动。
笛卡尔机器人的轴是由某种形式的线性致动器-购买作为一个预安装系统由制造商或OEM或最终用户定制的线性导轨和驱动组件。
简单,是吧?
的ISO 8373:2012标准将工业机器人定义为:
一种自动控制、可重新编程的多用途机械手,可在三个或多个轴上编程,可固定在原地或移动,用于工业自动化应用。开云体育store
但并不是每个在X-Y轴或X-Y- z轴上工作的线性系统都是笛卡尔机器人。一个值得注意的例外是一种平行使用两个基轴(X)的机器人。这种构型- 2X-Y或2X-Y- z,例如-将机器人从笛卡尔范畴移到龙门式机器人.
龙门式机器人和笛卡尔式机器人的主要区别是,笛卡尔式机器人在每个轴上使用一个线性驱动器,而龙门式机器人总是由两个基轴(X)构成,第二个轴(Y)横跨它们。这种结构可以防止第二轴被悬臂(下文将详细介绍),并允许龙门有更长的行程长度-在许多情况下,更大的有效载荷-比笛卡尔式机器人。
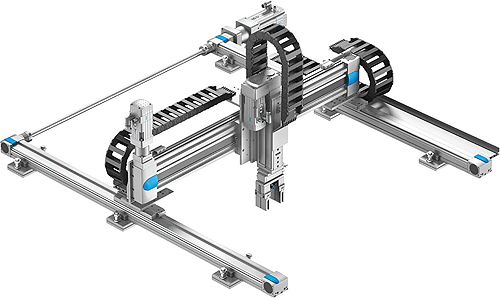
图片来源:费斯托集团
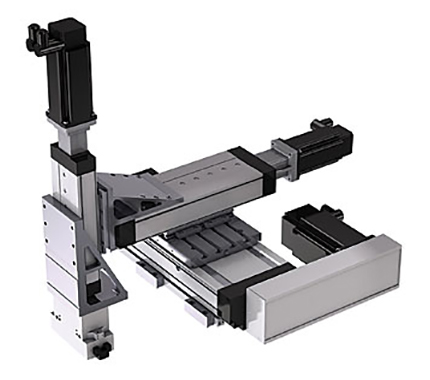
第二种是多轴线性系统不属于笛卡尔机器人定义的是XY表.笛卡尔式机器人与XY表的区别在于安装和装载的安排。在笛卡尔式机器人中,第二轴或第三轴(Y轴或Z轴)是悬挑的,只在一端由它下面的轴支撑。此外,外轴上的荷载通常从该轴上悬挑。
由于外加载荷,这种布置不仅在外轴上产生了力矩载荷,而且由于外加载荷与外轴的联合作用,在支撑轴上也产生了显著的力矩载荷。安装和装载安排限制了笛卡尔式机器人的承载能力,是决定外轴(悬臂)最大行程长度的主要因素。
相反,XY表由两个轴组成,它们彼此居中,通常具有相似的笔画长度。此外,荷载一般以Y轴为中心。这种轴配置和载荷定位导致在任意轴上都很少有悬臂加载(Y轴上通常没有悬臂加载)。

图片来源:Dover Motion
笛卡尔机器人在某些技术规格上与SCARA和6轴(铰接式)机器人重叠,并且可以应用于某些相同的应用,但笛卡尔机器人比SCARA和6轴机器人有几个优点。开云体育store首先,笛卡尔式设计提供了一个矩形的工作范围,其中很大一部分机器人足迹被用作活动工作区域。另一方面,SCARA和6轴类型具有圆形或椭圆形的工作信封,这通常会导致大量的死(未使用)空间,特别是当所需的行程或到达范围非常长时。
图片来源:博世力士乐公司
笛卡儿式机器人几乎可以由任何类型的线性驱动器和各种各样的驱动机构构成——皮带、滚珠或丝杠、气动驱动器或直线电机。(请注意,齿条和齿轮传动也是可能的,但更常用于非常长的行程的龙门系统。)这意味着它们可以,而且通常比SCARA和6轴类型具有更好的定位精度和可重复性。笛卡尔机器人在编程方面也具有易于使用的优势,因为它们的运动学更简单(三个笛卡尔轴,而不是多个旋转轴)。
在最近,预组装的笛卡尔机器人很少见,大多数单元都是由OEM、机器人集成商甚至最终用户定制的。但现在,许多线性驱动器制造商也提供预配置、预组装的笛卡尔系统,有无数的选项来满足常见的行程、有效载荷、速度和精度要求。传统6轴和SCARA机器人的制造商也开始参与进来,他们认识到,对于许多工业自动化和装配应用来说,笛卡尔机器人在负载能力和占地面积之间提供了比SCARA和6轴设计更好的权衡。开云体育store
欲了解更多有关机器人的新闻、分析和教育,请访问我们的姐妹站点在https://www.therobotreport.com.






留下回复
你一定是登录发表评论。