
对于许多任务,多轴线性系统-笛卡尔机器人,X-Y表和龙门架系统-直线旅行,以实现快速点对点的运动。但一些应用,如点胶开云体育store和切割,要求系统遵循圆形路径或复杂形状,这是简单的线条和弧线无法创建的。幸运的是,现代控制器具有强大的处理能力和计算速度,可以为具有两个、三个甚至更多运动轴的多轴系统确定和执行复杂的运动轨迹。
点对点运动
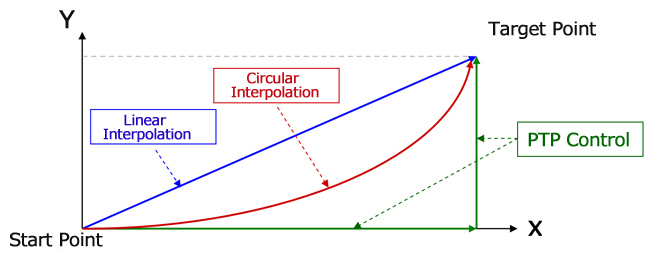
点对点运动的基本前提是到达一个指定的点,而不考虑所走的路径。在最简单的形式中,点到点运动独立地移动每个轴以达到目标位置。例如,要从点(0,0)移动到点(200,500),以毫米为单位,X轴将移动200mm,一旦到达它的位置,Y轴将移动500mm。在两个部分中独立移动通常是从一个点到另一个点的最慢的方法,所以这种形式的点到点的运动很少被使用。
点到点运动的另一种选择是使用相同的移动剖面同时移动轴。在上面的例子中——从(0,0)移动到(200,500)——X轴将在Y轴完成移动之前完成移动,因此运动路径将由两条相连的线组成。
图片来源:Dover Motion
混合运动
2.终点
3.勾兑圆角
图片来源:国家仪器公司
多轴线性系统点到点运动的一种变化形式是混合运动。为了创建混合移动,控制器将重叠或混合两个轴的移动剖面。当一个轴结束移动时,另一个轴开始移动,而不需要等待前一个轴完全停止。用户指定的“混合因子”定义了第二个轴应该开始移动的位置、时间或速度值。
当运动改变方向时,混合运动产生一个半径,而不是一个尖角。开云体育store如果被跟踪的部件或项目有圆角,则点胶和切割等应用可能需要混合运动。即使在移动的拐角处不需要一个半径(曲线),混合运动也可以保持轴的移动,避免在运动突然改变方向时停止和重新启动所需的减速和加速时间。
线性插值
多轴系统的一种更常见的运动类型是线性插值,它在轴之间协调运动。通过线性插值,控制器为每个轴确定适当的移动轮廓,以便所有轴同时到达目标位置。结果是在起点和终点之间有一条直线——最短路径。线性插值可用于2轴和3轴系统。
图片来源:The Contec Group
圆形的插值
对于圆周运动路径,或沿圆弧运动,多轴线性系统可以使用圆弧插补。这种运动类型的工作方式与线性插值非常相似,但它需要了解要遵循的圆或弧的参数,例如中心点、半径和方向,或中心点、起始角、方向和结束角。圆弧插补发生在两个轴上(通常是X和Y),但如果加上z轴的运动,结果是螺旋插补.
波状外形的运动
当一个多轴系统应该沿着特定的路径到达终点,但轨迹太复杂,无法使用一系列直线和/或弧线来定义时,就会使用轮廓。为了实现轮廓运动,在控制编程过程中提供了一系列的点,以及移动的时间,运动控制器使用线性和圆形插补来形成贯穿这些点的连续路径。
轮廓运动的变化,称为PVT运动(位置,速度和时间),通过指定每个点的目标速度(除了位置和时间)来避免突然的速度变化和平滑点之间的轨迹。
图片来源:国家仪器公司






留下回复
你一定是登录发表评论。